
最近,在建筑工地上开始出现了协作机器人的使用。由于大多数机器人不是完全自动化的并且需要某种控制机制,因此将机器人融入到人类主导的环境中可能引发安全问题。
在实际的一些场景中,比如工人需要机器人的协助但无法用双手来操控机器人,此时传统的控制系统可能无法达到要求。脑机接口(BCI)可以提供这种无需用手的可控性。
宾夕法尼亚州立大学(Pennsylvania State University)的研究人员提出了一种基于BCI的机器人远程控制系统,该系统通过连续采集可穿戴式脑电图(EEG)设备中工人的脑电波,并以90%的准确率将其解释为机器人指令。研究结果表明,该系统有望提高机器人在危险作业中的控制能力。
BCI机器人控制系统的成功研究应用证明了该技术在增强工人与机器人之间以人为主导的通信(控制)方面的潜力。这样的技术可以在没有物理交互的情况下,无需用手就能实现对机器人的控制。这种集成的范围可以提高建筑任务中的生产率以及在安全问题上对机器人性能进行提高。
它可以帮助工人需要手来执行即将发生的动作的场景,例如抓住未完成的建筑物的框架以获得更好的稳定性,或者执行需要双手的灵巧任务。在这些情况下,可以将BCI系统作为“第三只手”来实施,以放松物理限制并提高生产率。
这类场景的一个例子是,一名工人控制UGV机器人将急需的设备/材料运送到预定的位置,可能是在高海拔,,而同一工人在施工任务(例如执行砌筑)期间正在积极使用双手的情况。任务)。通过对比图1-A所示的基于BCI的场景和正常场景以及单个bondB,可以看到潜在的生产率提高。

图1 A:基于MI-BCI的机器人在建筑材料交付过程中控制技术的潜在应用;
B:手工交付建筑材料;C:基于MI-BCI的技术在远程避免意外事故方面的潜在应用。
此外,如果工作人员在事故发生前捕捉到的脑电图信号能够准确地转换为机器人的动作,MI-BCI方法可以在机器人系统中实现远程停止。此功能对于赋予机器人控制系统更高的安全级别特别有用,甚至在工人点击物理停止按钮之前就启动远程安全停止命令的传输。通过这种方式,控制系统利用“包含”工人意图的EEG信号来避免可能的事故,如被机器人撞击,这可以显着提高复杂和不受控制的建筑环境中机器人应用的安全性和可靠性。图1-C可视化了这种在未来建筑工地的潜在应用。
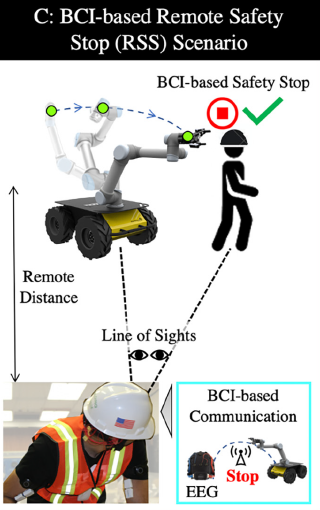
图1-C BCI在未来建筑工地的潜在应用
系统框架
研究人员所提出的BCI系统分为两个阶段,即离线训练(阶段1)和在线机器人操纵(阶段2)。在阶段1中,研究者通过在离线设置中应用集成算法来开发机器人命令的预测模型。集成算法旨在通过使用多个分类器来提高预测模型在生成正确命令中的准确性。在阶段2中,研究人员设计了两个子系统并将其集成到他们提出的机器人控制系统中,分别是机器人命令生成子系统和机器人控制子系统。前者旨在根据工人的运动想象诱发的脑电信号的预测集成模型结果创建机器人命令。同时设计了基于动力学函数的机器人控制系统,对所传输的指令进行评估和执行。
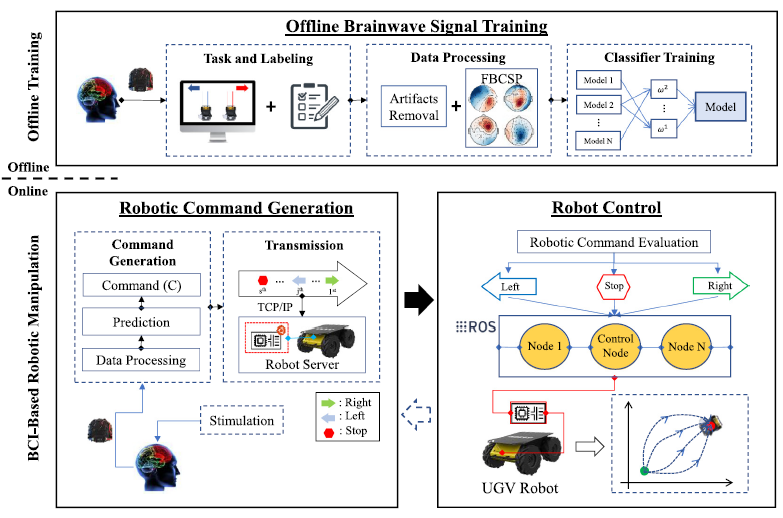
图2 BCI机器人控制系统概述
机器人控制系统的整个体系结构是基于机器人操作系统(ROS)构建的,其中集中式工作站可以迅速操作这些过程来控制UGV机器人。
离线过程
下图展示了用于训练集成分类器的主要离线过程。

图3.生成集成分类器的离线训练过程。
A:去除伪影前后的脑电信号;
B:BCI的滤波器组和常见的空间模式特征;
C:整体分类器的总体训练过程。
MI任务包括三个连续的时间间隔、注视交叉、视觉提示和运动想象(图7)。在第一个时间间隔中,十字准线显示在监视器的中央。此步骤旨在减少所有受试者数据收集的不一致性。在暂停2秒后,选择与三个想象动作(右箭头、左箭头和停止图像)中的一个对应的视觉符号,并在1.5秒内显示给被试。这一步的目的是诱导每个受试者的视觉干预。在最后的运动想象阶段,被试被要求对视觉符号活动进行4秒的想象(向左或向右运动和双脚站立)。

运动想象实验流程案例
在MI任务中,通过使用一个现成的可穿戴式脑电图耳机(Emotiv Flex)来收集脑波,该耳机具有32个内置通道。采集信号的采样率为128,信号分辨率为14位,连通性为2.4 GHz(图8-C和-D)。在每个试验中,将根据相应的会话自动标记收集的EEG信号。因此,对于向左移动、向右移动和停止会话,分别标记 1、+1和0。
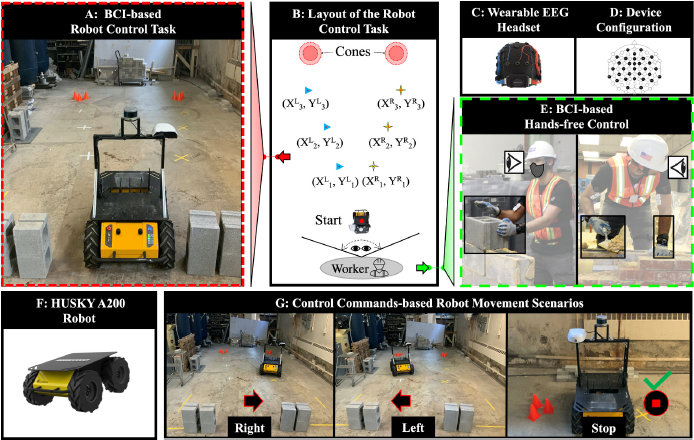
图8. A:基于BCI的机器人控制任务的实验场景;B:基于BCI的机器人控制任务的布局;C:可穿戴式EEG D:配置32通道脑电图设备;E:执行砌体任务时对象的控制场景;G:右控制(RC)任务场景;左控制(LC)任务场景;远程安全停止(RSS)任务场景。
总结
研究人员在本项研究中提出了一种基于BCI的机器人远程控制系统,该系统通过连续采集可穿戴式脑电图(EEG)设备中工人的脑电波,并以90%的准确率将其解释为机器人指令。研究结果表明,该系统有望提高机器人在危险作业中的控制能力。
这项研究提出了许多需要进一步研究的问题。其中之一是确定是否可以检查更精细的BCI机器人控制,如控制UGV机器人的速度或机械臂的运动来提升和放置物体。利用颅内记录解码运动学运动参数可以实现更精细的机器人控制。
论文信息:
Brain-computer interface for hands-free teleoperation of construction robots
版权声明:编译作者:邹思
文章仅用于学术交流,不用于商业行为,
若有侵权及疑问,请后台留言,管理员即时删侵!













