
校准要点说明
ABB为单圈绝对编码器,编码器的所转圈数由SMB板存储,当SMB板没电,存储的数值就会丢失,此时则会报转述计数器更新故障。
微校,一般只有在更换电机、机器人发生结构变化时才需要微校,一般不进行操作。微校后可以进行转述计数器更新,也会把出厂时测定的电机偏移值清零。
Axis校准方法:通过调用AxisCalibration服务例行程序,然后按照指引进行。需要有硬件pin。校准后会更新转述计数器和电机偏移值。
|当机器人报“50295/50296 SMB内存差异”的处理办法
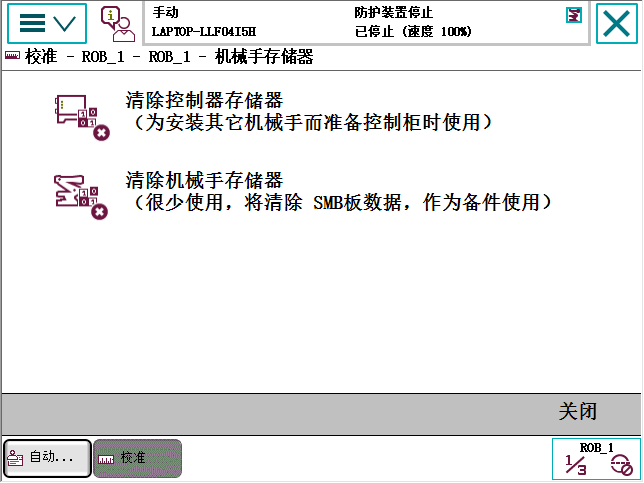
一,清楚机器人内部原有内存
步骤为:ABB主菜单-校准-ROB_1-进入“机械手存储器”-单击“高级”,进入下图所示界面,依次清除控制柜内存和机械手内存(SMB测量电路板)。
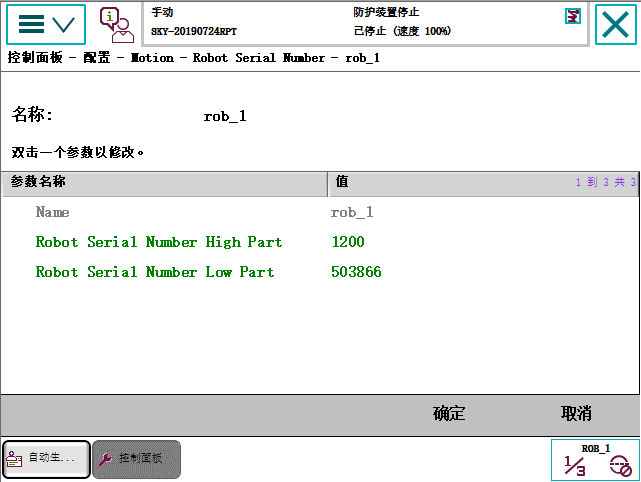
二,机器人序列号写入,以1410-503866为例
步骤为:ABB主菜单-控制面板-配置-主题选择“Motion”-进入“Robot Serial Number”-rob1,分别在”robot serial number high part”写入1200,在robot serial number low part”写入“503866”,配置完成后重启生效。
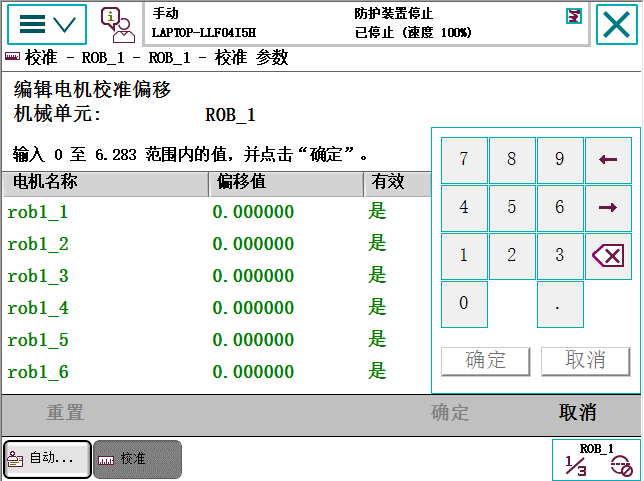
第三步:重新写入“电机校准偏移”值
步骤为:ABB主菜单-校准-ROB_1-进入“编辑电机校准偏移”,如下图。分别将机器人手臂后面的标签上的数值对应写入示教器,填写完成后重启生效。
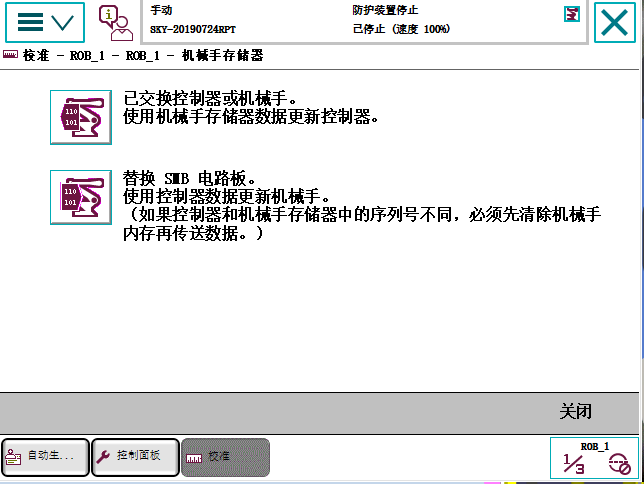
第四步,同步控制柜内存与SMB内存
步骤一:ABB主菜单-校准-ROB_1-进入“机械手存储器”-单击“高级”,清除机械手内存(SMB测量电路板)。
步骤二:ABB主菜单-校准-ROB_1-进入“机械手存储器”-单击“更新”,进入下图,点击“替换SMB电路板”,然后重启机器人。
第五步:更新机器人转数计数器
关于校准的步骤这里就不再叙述,如果想了解更多,可以关注“玩转工业机器人”进行了解。













